一、潛伏牽引AGV
潛伏牽引AGV是一種特殊的自動導引車輛,它在車輛行駛過程中與路面保持一定的距離,通常是在車輛的底部或車輛的側面。這種類型的AGV通常使用一種叫做潛伏牽引的技術,它使用一個低于車輛底部的傳感器來檢測路面,從而實現自動導引。
潛伏牽引AGV可分雙向雙驅動潛伏牽引、單驅動單向尾部牽引等,在工業生產中被廣泛使用,因為它們能夠提供高精度的導引性能,并且能夠在復雜的工業環境中安全、穩定地行駛。它們通常被用于轉運材料、裝卸貨物、運送零件和其他工業應用。
二、優點
潛伏牽引AGV能夠在復雜的工業環境中地導引車輛,并且能夠在車輛行駛過程中與路面保持一定的距離,這使得它們能夠在復雜的工業環境中穩定地行駛。此外,還具有較高的載荷能力,能夠承受比較大的負載,因此它們在工業生產中廣泛使用。
三、AGV小車結構
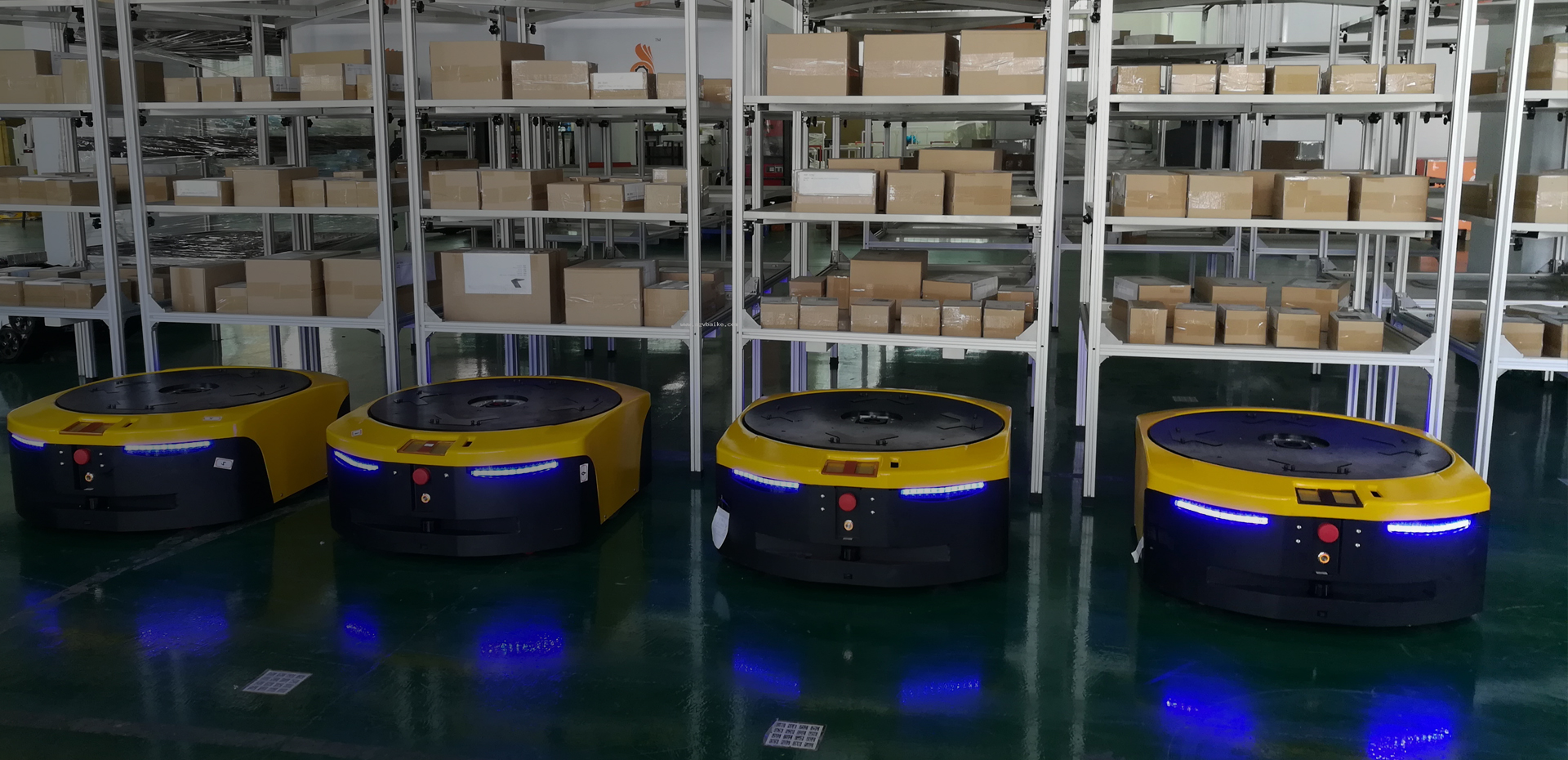
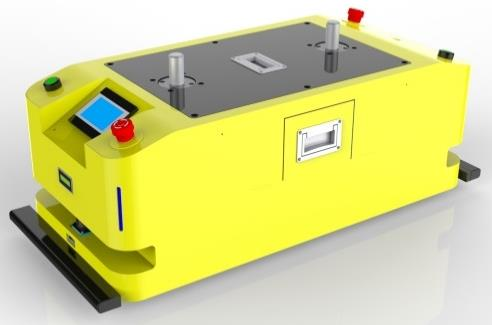
3.1、車身
外觀肉眼可以看得到的小車底盤、車架、車輪、顯示屏以及各個按鍵等,車身通常是由鋁合金或鋼板制成,并配有支撐輪和動力輪。
3.2、車身內部結構(電機、減速箱、電路、電控系統以及各個系統等)
傳動系統:包括電機、減速機、齒輪箱和輪胎。AGV 小車的傳動系統負責將電能轉化為動力,并通過輪胎帶動車身前進;
導引系統:包括導引裝置、導引信標和傳感器。AGV 小車的導引系統負責按照預設路徑導引車輛前進;
控制系統:包括微處理器控制器、控制電路和軟件。控制系統負責接收來自導引系統的信息,并根據信息控制傳動系統的工作;
電源系統:包括電池、充電器和電源管理系統。電源系統負責為整車提供電能,直流電壓有12伏、24伏、48伏及72伏。
附加裝置:包括載物臺、夾具和其他附加設備。
四、AGV小車如何避讓
AGV小車會使用傳感器(例如激光傳感器、超聲波傳感器或紅外傳感器)來掃描周圍的環境,以便及時發現障礙物。當探測到障礙物時,它會調整自己的路徑,避開障礙物。如果AGV小車探測到障礙物在它前方,它可能會向左或右轉彎,或者停下來等待障礙物移開。
需要注意的是,AGV小車在避讓障礙物時可能會受到路徑規劃算法的限制,因此它可能不會立即避開障礙物,而是會在避開障礙物的同時盡量保證路徑規劃的準確性。AGV小的避讓能力也可能受到傳感器的精度和范圍的限制,應該注意設置適當的傳感器。
總部
王先生 166 2067 5888(微信同號)
盧 工 130 6618 0620(微信同號)
葉 工 180 3303 1613(微信同號)
地 址:廣東省東莞市寮步鎮寮步香園東路60號5棟901室
東南亞越南分公司
電話:0084-9188 90910(文先生)
電話:0084-0335 355585(杜小姐)
電話:189 2527 1259(微信同號)文先生
地址:北寧省桂武縣鳳毛社毛豎村18號路