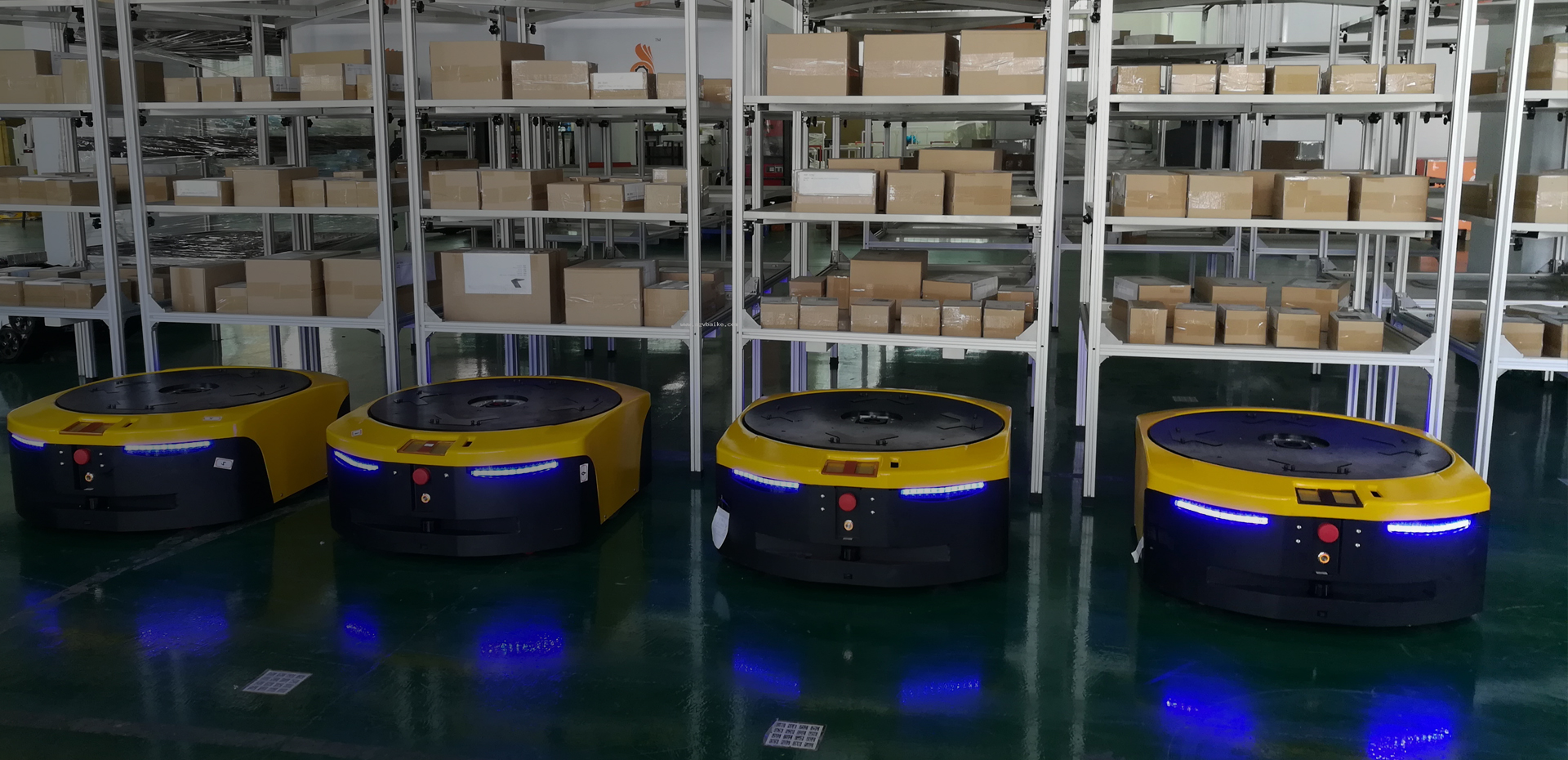
一、視覺導航AGV產品特點
視覺導航AGV是通過攝像頭、激光雷達等視覺傳感器來感知周圍環境,實現自主導航和避障,避免了需要在環境中添加標記或導引線的局限性,具有更高的靈活性和適應性。此外,視覺導航AGV還可以通過視覺識別技術來實現自動識別、撿揀等功能,廣泛應用于物流、制造等領域。
二、工作原理
環境感知
AGV通過視覺傳感器(如攝像頭、激光雷達等)感知周圍環境,包括地面、障礙物、目標位置等信息。同時,還可以通過編碼器、陀螺儀等傳感器獲取自身狀態信息,如位置、速度、角度等。
地圖構建
AGV通過激光雷達等傳感器獲取環境中的障礙物信息,并根據此信息構建地圖。地圖可以是二維或三維的,用于描述環境的幾何形狀、障礙物位置、目標位置等信息。
路徑規劃
AGV根據地圖信息和目標位置,利用路徑規劃算法(如A*算法、Dijkstra算法等)計算出到達目標位置的最短路徑。路徑規劃的目標是使AGV能夠快速、安全地到達目標位置,并盡可能避免碰撞或卡住。
運動控制
AGV根據路徑規劃的結果,控制自身運動。控制方式可以是輪式或履帶式,AGV可以前進、后退、轉彎等多種運動方式。同時,AGV還需要實時調整運動軌跡,以適應環境變化或避開障礙物。
目標識別
如果AGV需要執行物品撿揀等任務,需要實現目標識別。AGV可以通過視覺識別技術(如神經網絡、深度學習等)對目標進行自動識別,并進行自動抓取等操作。

三、視覺導航AGV,給企業帶來的好處
近年來,我們的生產和物流方式發生了翻天覆地的變化,從傳統的人工操作到現代的自動化技術,已經成為了不可逆轉的潮流。而視覺導航AGV,正是這股潮流中的一股璀璨明珠,它讓自動化運輸更加智能高效,成為了生產線上的明星工具!
視覺導航AGV,采用了先進的激光雷達、攝像頭等傳感器技術,通過對周圍環境進行感知和分析,實現自主導航和自主任務執行,無需人為干預,真正做到了“一機在手,天下我有”的霸氣!
在生產和物流方面,視覺導航AGV更是如虎添翼,讓工作效率和精準度大幅提高,讓人類的生產力得到充分釋放。它能夠快速地完成各種物品搬運、物料輸送等任務,自主規劃路徑,避開障礙物,大幅度提高了運作效率,降低了運作成本,為企業創造了巨大的經濟效益。
視覺導航AGV還能夠實現多任務自動化運作,讓企業在生產線上擁有更高的自動化程度,減少人力干預,讓人們可以更加專注于任務,提高了工作質量和效率,讓企業更加高效、智能、富有競爭力!不僅是一種自動化工具,更是企業未來發展的必然趨勢。
總部
王先生 166 2067 5888(微信同號)
盧 工 130 6618 0620(微信同號)
葉 工 180 3303 1613(微信同號)
地 址:廣東省東莞市寮步鎮寮步香園東路60號5棟901室
東南亞越南分公司
電話:0084-9188 90910(文先生)
電話:0084-0335 355585(杜小姐)
電話:189 2527 1259(微信同號)文先生
地址:北寧省桂武縣鳳毛社毛豎村18號路